ENC3M is a simple and reliable underwater navigation system – allowing for multi-point track planning, and GPS assisted re-calibration of diver position. Due to very simple operation, minimal size, easy installation on the propulsion system, or even hand-held usage (for example in the final approach stage) it is a very versatile tool for divers requiring to have a reliable information about their position underwater.
With numerous mounting and usage options, it is a modular tool which can be used:
- as a basic navigation console- standalone, displaying current heading, depth and time
- combined with speed sensor, to be fully capable of underwater navigation based on dead-reckoning principles
- combined with GPS buoy- allowing for position re-calibration without ascending to the surface
- combined with GPS rigid mast- for easy position fix of fast-moving team, or in high-current flow water (as-rivers)
ENC3M Route planning
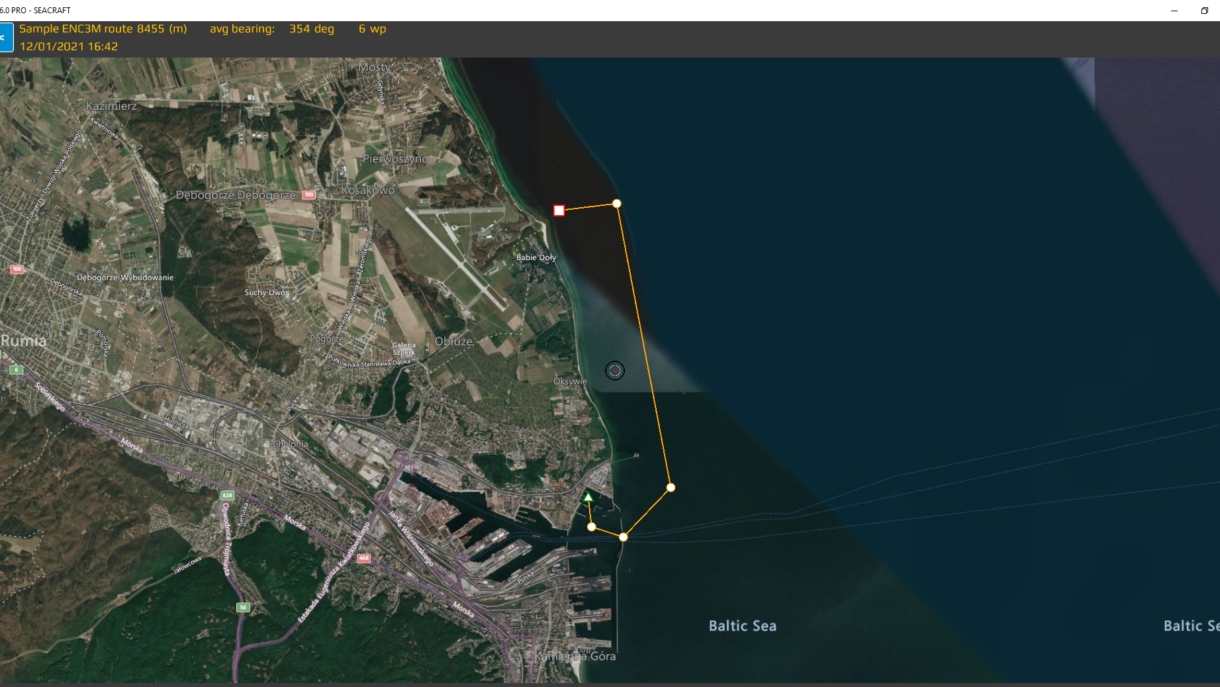
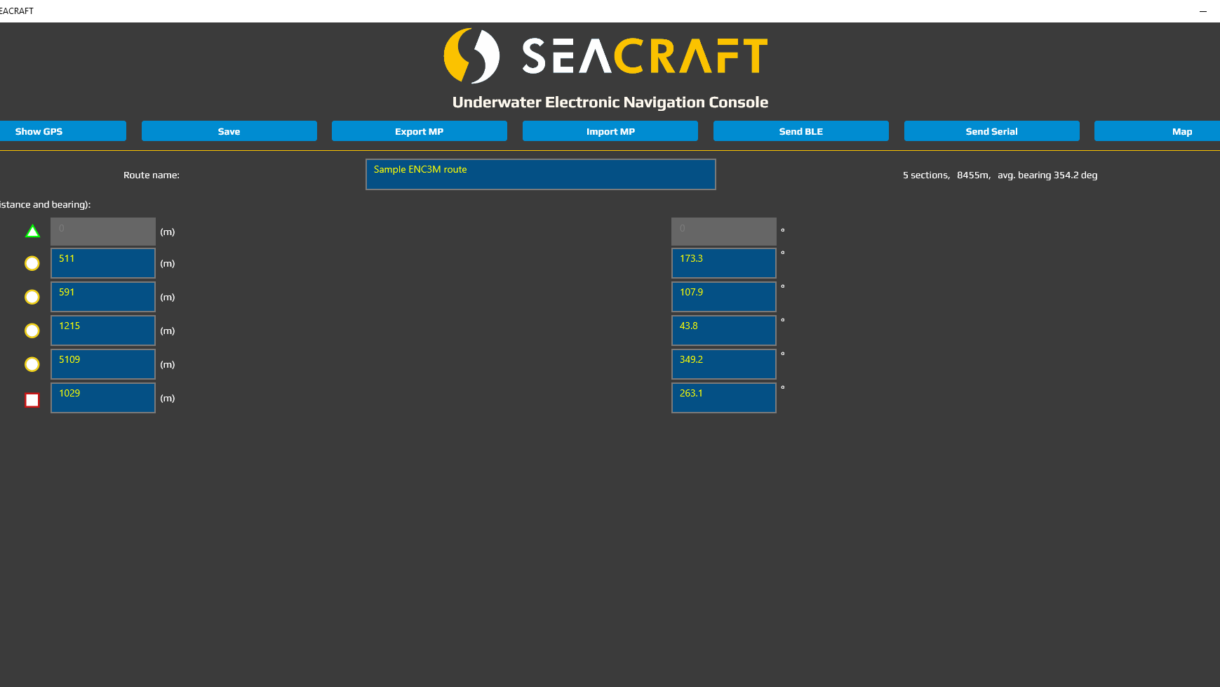
Route can be planned as multi-point track- in visual way, in the azimuth-distance based way, or as absolute GPS locations of particular point.

ENC3M Underwater operation
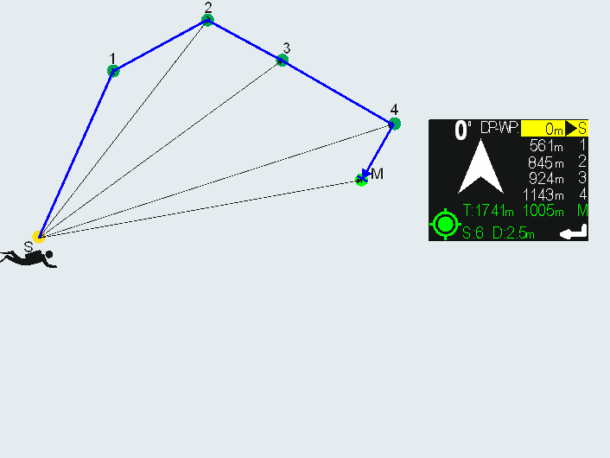
Underwater, any point can be chosen at any moment – resulting in the display of the shortest possible (linear) route to the given point.
ENC3M will use a calculated 100% underwater estimated position, or- if there is a good fixed position available – recalculate position and directions in real-time.
The diver can follow the pre-planned points one-by-one, or decide based on the situation where he wants to navigate.

Modular constructionRigid foldable mast
The ENC3M is designed in a way, that supports the operator in fulfilling various mission types. Different GPS receivers may be connected to standard device.
Special constructed mast, which is easy to fold into small element and store on the DPV – has a unique low drag profile, what reduces turbulences, vibrations, and sub-surface operator can obtain a fixed position even moving with a great speed.
Rigid mast optimized for the low hydrodynamic draft. It is used when stopping is not an option, or a constant position fix is needed.
On the attached picture scooter TAC1000 with ENC3M with a foldable rigid mast with GPS module.

Modular constructionGPS type B
GPS type B module receiver which can be installed directly on the console, with a 10 cm compact cable connection. The same module can be directly attached to the ENC3M with a 10 cm cable or used with a 3 m, or 10 m long cable and additional buoyancy floats. Cables can be easily switched with the same GPS module.
On attached picture scooter TAC1000 with ENC3M with GPS type B module receiver with a 10 m long cable and additional buoyancy floats.
ENC3M available sets

Military and special ENC3M Navigation platform

Military and special ENC3M dedicated for TAC1000

Military and special ENC3M dedicated for TAC2000

Military and special ENC3M dedicated for other DPVs
ENC3-MIL Support



